

El módulo cuenta con todos los componentes necesarios para funcionar sin necesidad de elementos adicionales, entre ellos diodos de protección y un regulador LM7805 que suministra 5V a la parte lógica del integrado L298N, este módulo permite controlar dos motores de DC o un motor paso a paso bipolar de hasta 2 amperes de corriente, este módulo se puede alimentar de 2 maneras gracias al regulador integrado LM7805.
Este módulo trabaja desde 3V hasta 35V, y con una intensidad de hasta 2A, consume 3V así que los motores reciben 3 voltios menos de el voltaje ingresado, incluye un regulador que nos puede dar una salida de 5V, si lo alimentamos entre 5 a 12V.
Es un módulo que se utiliza mucho en proyectos de robótica, por su facilidad de uso y su reducido precio.

- Modulo Puente H Driver L298N Para Motores Paso A Paso
- Uno R3 + Cable USB para Arduino
- Jumpers Macho-Hembra 20cm
- Jumpers Macho-Macho 20cm

//Tutorial de uso L298
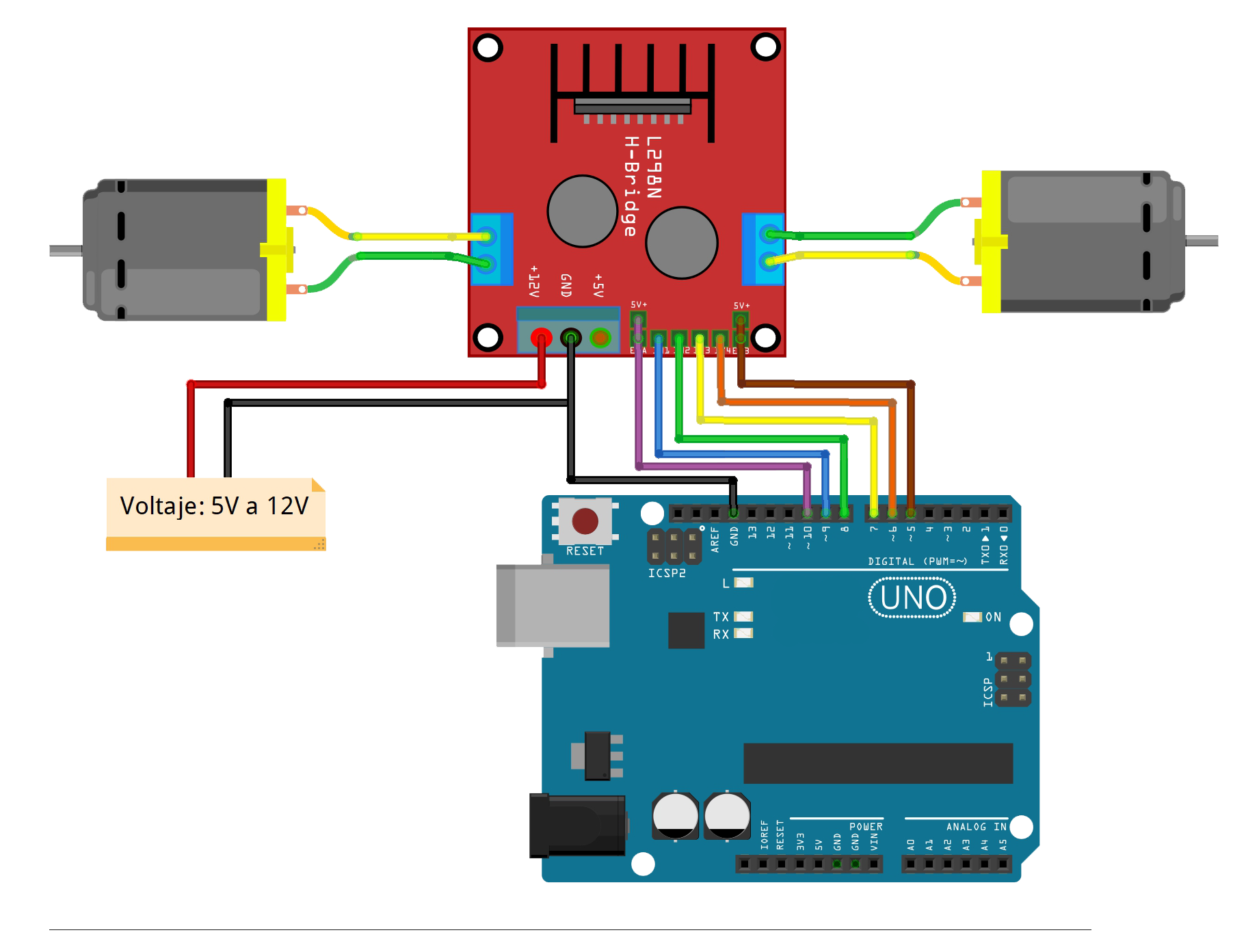
// Motor 1
int ENA = 10;
int IN1 = 9;
int IN2 = 8;
// Motor 2
int ENB = 5;
int IN3 = 7;
int IN4 = 6;
void setup ()
{
// Declaramos los pines como salidas
pinMode (ENA, OUTPUT);
pinMode (ENB, OUTPUT);
pinMode (IN1, OUTPUT);
pinMode (IN2, OUTPUT);
pinMode (IN3, OUTPUT);
pinMode (IN4, OUTPUT);
}
void loop ()
{
Adelante ();
delay (5000);
Atras ();
delay (3000);
Derecha ();
delay (2000);
Izquierda ();
delay (2000);
Parar ();
delay (4000);
}
void Adelante ()
{
//Direccion de motor 1
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
analogWrite (ENA, 255); //Velocidad de motor 1
//Direccion de motor 2
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
analogWrite (ENB, 255); //Velocidad de motor 2
}
void Atras ()
{
//Direccion de motor 1
digitalWrite (IN1, LOW);
digitalWrite (IN2, HIGH);
analogWrite (ENA, 128); //Velocidad de motor 1
//Direccion de motor 2
digitalWrite (IN3, LOW);
digitalWrite (IN4, HIGH);
analogWrite (ENB, 128); //Velocidad de motor 2
}
void Derecha ()
{
//Direccion de motor 1
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
analogWrite (ENA, 200); //Velocidad de motor 1
//Direccion motor 2
digitalWrite (IN3, LOW);
digitalWrite (IN4, HIGH);
analogWrite (ENB, 100); //Velocidad de motor 2
}
void Izquierda ()
{
//Direccion de motor 1
digitalWrite (IN1, LOW);
digitalWrite (IN2, HIGH);
analogWrite (ENA, 50); //Velocidad de motor 1
//Direccion de motor 2
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
analogWrite (ENB, 150); //Velocidad de motor 2
}
void Parar ()
{
//Direccion de motor 1
digitalWrite (IN1, LOW);
digitalWrite (IN2, LOW);
analogWrite (ENA, 0); //Velocidad de motor 1
//Direccion de motor 2
digitalWrite (IN3, LOW);
digitalWrite (IN4, LOW);
analogWrite (ENB, 0); //Velocidad de motor 2
}
Nota: En caso de que los motores se muevan en sentidos diferentes solo tienes que cambiar la polaridad de los mismos.

