


Es un robot bípedo interactivo con el cual podemos realizar como pequeño experimento para escuelas o colegios, universidades, o como practica en el área de Robotica y Electrónica.
Con nuestro robot podrás descubrir nuevas maneras de aprender, compartir y divertirte. Su diseño esta hecho de manera impresa en una impresora 3D. Junto a una programación open source (código abierto para cualquier persona que lo utilice).

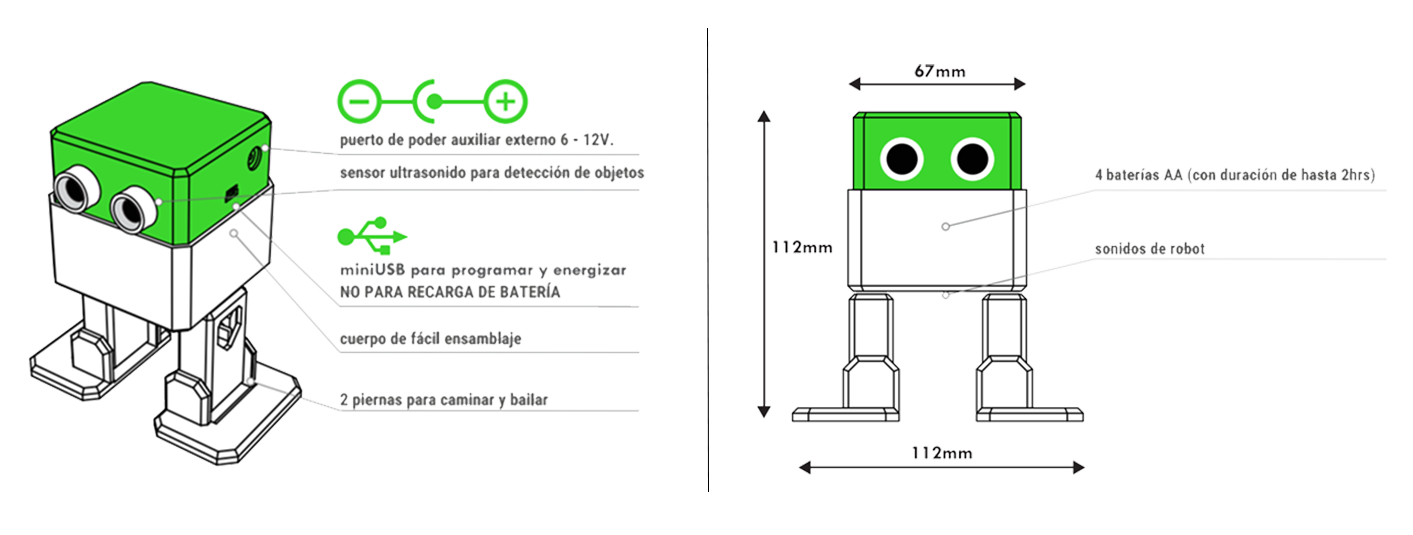
Para el ensamblaje de nuestro Robot de Electrónica utilizamos una variedad componentes que trabajan en conjunto entre si, servos, jumpers, botones y placa microcontroladora. Hemos ensamblado un Kit que trae consigo todos los componentes de este kit junto a una lista detallada de sus componentes. ¡Échale un vistazo al siguiente enlace!
Kit Robot Compatible con Arduino

El Robot Compatible con Arduino es el acompañante ideal con el cual podemos desarrollar al momento habilidades conectadas al área de aprendizaje de la ciencia, la relación de la tecnología y las ingenierías junto al diseño y matemáticas necesarias para desarrollar distintos procesos.
Nuestro robot trae consigo un montón de posibilidades de movimiento, sonido y ejecuciones al haberse causado una acción. A continuación te dejaremos un pequeño código de testeo con el cual podrás probar el uso del Robot.

//----------------------------------------------------------------
//-- Otto Dance smooth criminal by Michael Jackson
//-- Released under a GPL licencse (http://ottodiy.com)
//-- Originally made for Zowi project remake for Otto DIY
//-- Authors: Javier Isabel: Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
//-- Juan Gonzalez (obijuan): Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
// Nicu FLORICA (niq_ro) add Ultrasonic Sensor (US) for activate dance
// and deactivate servo in standby (ver1b)
// http://www.arduinotehniq.com & Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
//-----------------------------------------------------------------
#include < Servo.h>
#include < Oscillator.h>
#include < EEPROM.h>
#define N_SERVOS 4
//-- First step: Configure the pins where the servos are attached
/*
---------------
| O O |
|---------------|
YR 3==> | | <== YL 2
---------------
|| ||
RR 5==> ----- ------ <== RL 4
|----- ------|
*/
#define EEPROM_TRIM false
// Activate to take callibration data from internal memory
#define TRIM_RR 7
#define TRIM_RL 4
#define TRIM_YR 4
#define TRIM_YL -7
//OTTO.setTrims(-7,-4,-4,7);
#define PIN_RR 5
#define PIN_RL 4
#define PIN_YR 3
#define PIN_YL 2
#define INTERVALTIME 10.0
Oscillator servo[N_SERVOS];
/*
void goingUp(int tempo);
void drunk (int tempo);
void noGravity(int tempo);
void kickLeft(int tempo);
void kickRight(int tempo);
void run1(int steps, int T=500);
void walk(int steps, int T=1000);
void backyard(int steps, int T=3000);
void backyardSlow(int steps, int T=5000);
void turnLeft(int steps, int T=3000);
void turnRight(int steps, int T=3000);
void moonWalkLeft(int steps, int T=1000);
void moonWalkRight(int steps, int T=1000);
void crusaito(int steps, int T=1000);
void swing(int steps, int T=1000);
void upDown(int steps, int T=1000);
void flapping(int steps, int T=1000);
*/
#define ECHOPIN 9 // Pin to receive echo pulse
#define TRIGPIN 8 // Pin to send trigger pulse
int trimu;
int dansezpttine = 0;
void setup()
{
// Serial.begin(19200);
servo[0].attach(PIN_RR);
servo[1].attach(PIN_RL);
servo[2].attach(PIN_YR);
servo[3].attach(PIN_YL);
//EEPROM.write(0,TRIM_RR);
//EEPROM.write(1,TRIM_RL);
//EEPROM.write(2,TRIM_YR);
//EEPROM.write(3,TRIM_YL);
if(EEPROM_TRIM){
for(int x=0;x<4;x++){
trimu=EEPROM.read(x);
if(trimu>128)trimu=trimu-256;
Serial.print("TRIM ");
Serial.print(x);
Serial.print(" en ");
Serial.println(trimu);
servo[x].SetTrim(trimu);
}
}
else{
servo[0].SetTrim(TRIM_RR);
servo[1].SetTrim(TRIM_RL);
servo[2].SetTrim(TRIM_YR);
servo[3].SetTrim(TRIM_YL);
}
for(int i=0;i<4;i++) servo[i].SetPosition(90);
delay(500);
for(int i=0;i<4;i++) servo[i].detach();
pinMode(ECHOPIN, INPUT);
pinMode(TRIGPIN, OUTPUT);
}
// TEMPO: 121 BPM
int t=495;
double pause=0;
void loop()
{
// if(Serial.available()){
// char init = Serial.read();
// if (init=='X'){
// delay(4000); //3000 - 4500
// Start Ranging
digitalWrite(TRIGPIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGPIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGPIN, LOW);
// Compute distance
float distance = pulseIn(ECHOPIN, HIGH);
distance= distance/58;
Serial.print(distance);
Serial.println("cm");
if ((distance >1) && (distance < 25))
{
Serial.println ("Danceeeee !");
dansezpttine = 1;
}
if (dansezpttine == 1)
{
servo[0].attach(PIN_RR);
servo[1].attach(PIN_RL);
servo[2].attach(PIN_YR);
servo[3].attach(PIN_YL);
if(EEPROM_TRIM){
for(int x=0;x<4;x++){
trimu=EEPROM.read(x);
if(trimu>128)trimu=trimu-256;
Serial.print("TRIM ");
Serial.print(x);
Serial.print(" en ");
Serial.println(trimu);
servo[x].SetTrim(trimu);
}
}
else{
servo[0].SetTrim(TRIM_RR);
servo[1].SetTrim(TRIM_RL);
servo[2].SetTrim(TRIM_YR);
servo[3].SetTrim(TRIM_YL);
}
delay(100);
dance();
delay(500);
for(int i=0;i<4;i++) servo[i].SetPosition(90);
delay(500);
for(int i=0;i<4;i++) servo[i].detach();
dansezpttine = 0;
}
delay(200);
//for(int i=0;i<4;i++) servo[i].SetPosition(90);
// }
// }
}
void dance(){
primera_parte();
segunda_parte();
moonWalkLeft(4,t*2);
moonWalkRight(4,t*2);
moonWalkLeft(4,t*2);
moonWalkRight(4,t*2);
primera_parte();
crusaito(1,t*8);
crusaito(1,t*7);
for (int i=0; i<16; i++){
flapping(1,t/4);
delay(3*t/4);
}
moonWalkRight(4,t*2);
moonWalkLeft(4,t*2);
moonWalkRight(4,t*2);
moonWalkLeft(4,t*2);
drunk(t*4);
drunk(t*4);
drunk(t*4);
drunk(t*4);
kickLeft(t);
kickRight(t);
drunk(t*8);
drunk(t*4);
drunk(t/2);
delay(t*4);
drunk(t/2);
delay(t*4);
walk(2,t*2);
backyard(2,t*2);
goingUp(t*2);
goingUp(t*1);
noGravity(t*2);
crusaito(1,t*2);
crusaito(1,t*8);
crusaito(1,t*2);
crusaito(1,t*8);
crusaito(1,t*2);
crusaito(1,t*3);
delay(t);
primera_parte();
for (int i=0; i<32; i++){
flapping(1,t/2);
delay(t/2);
}
for(int i=0;i<4;i++) servo[i].SetPosition(90);
}
////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////FUNCIONES DE CONTROL//////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////////
void oscillate(int A[N_SERVOS], int O[N_SERVOS], int T, double phase_diff[N_SERVOS]){
for (int i=0; i<4; i++) {
servo[i].SetO(O[i]);
servo[i].SetA(A[i]);
servo[i].SetT(T);
servo[i].SetPh(phase_diff[i]);
}
double ref=millis();
for (double x=ref; x<T+ref; x=millis()){
for (int i=0; i<4; i++){
servo[i].refresh();
}
}
}
unsigned long final_time;
unsigned long interval_time;
int oneTime;
int iteration;
float increment[N_SERVOS];
int oldPosition[]={90,90,90,90};
void moveNServos(int time, int newPosition[]){
for(int i=0;i<N_SERVOS;i++) increment[i] = ((newPosition[i])-oldPosition[i])/(time/INTERVALTIME);
final_time = millis() + time;
iteration = 1;
while(millis() < final_time){ //Javi del futuro cambia esto
interval_time = millis()+INTERVALTIME;
oneTime=0;
while(millis()<interval_time){
if(oneTime<1){
for(int i=0;i<N_SERVOS;i++){
servo[i].SetPosition(oldPosition[i] + (iteration * increment[i]));
}
iteration++;
oneTime++;
}
}
}
for(int i=0;i<N_SERVOS;i++){
oldPosition[i] = newPosition[i];
}
}
//////////////////////////////////////////////////////////////////////////////
////////////////////////////////PASOS DE BAILE////////////////////////////////
//////////////////////////////////////////////////////////////////////////////
void goingUp(int tempo){
pause=millis();
for(int i=0;i<4;i++) servo[i].SetPosition(90);
delay(tempo);
servo[0].SetPosition(80);
servo[1].SetPosition(100);
delay(tempo);
servo[0].SetPosition(70);
servo[1].SetPosition(110);
delay(tempo);
servo[0].SetPosition(60);
servo[1].SetPosition(120);
delay(tempo);
servo[0].SetPosition(50);
servo[1].SetPosition(130);
delay(tempo);
servo[0].SetPosition(40);
servo[1].SetPosition(140);
delay(tempo);
servo[0].SetPosition(30);
servo[1].SetPosition(150);
delay(tempo);
servo[0].SetPosition(20);
servo[1].SetPosition(160);
delay(tempo);
while(millis()<pause+8*t);
}
void primera_parte(){
int move1[4] = {60,120,90,90};
int move2[4] = {90,90,90,90};
int move3[4] = {40,140,90,90};
for(int x=0; x<3; x++){
for(int i=0; i<3; i++){
lateral_fuerte(1,t/2);
lateral_fuerte(0,t/4);
lateral_fuerte(1,t/4);
delay(t);
}
pause=millis();
for(int i=0;i<4;i++) servo[i].SetPosition(90);
moveNServos(t*0.4,move1);
moveNServos(t*0.4,move2);
while(millis()<(pause+t*2));
}
for(int i=0; i<2; i++){
lateral_fuerte(1,t/2);
lateral_fuerte(0,t/4);
lateral_fuerte(1,t/4);
delay(t);
}
pause=millis();
for(int i=0;i<4;i++) servo[i].SetPosition(90);
crusaito(1,t*1.4);
moveNServos(t*1,move3);
for(int i=0;i<4;i++) servo[i].SetPosition(90);
while(millis()<(pause+t*4));
}
void segunda_parte(){
int move1[4] = {90,90,80,100};
int move2[4] = {90,90,100,80};
int move3[4] = {90,90,80,100};
int move4[4] = {90,90,100,80};
int move5[4] = {40,140,80,100};
int move6[4] = {40,140,100,80};
int move7[4] = {90,90,80,100};
int move8[4] = {90,90,100,80};
int move9[4] = {40,140,80,100};
int move10[4] = {40,140,100,80};
int move11[4] = {90,90,80,100};
int move12[4] = {90,90,100,80};
for(int x=0; x<7; x++){
for(int i=0; i<3; i++){
pause=millis();
moveNServos(t*0.15,move1);
moveNServos(t*0.15,move2);
moveNServos(t*0.15,move3);
moveNServos(t*0.15,move4);
while(millis()<(pause+t));
}
pause=millis();
moveNServos(t*0.15,move5);
moveNServos(t*0.15,move6);
moveNServos(t*0.15,move7);
moveNServos(t*0.15,move8);
while(millis()<(pause+t));
}
for(int i=0; i<3; i++){
pause=millis();
moveNServos(t*0.15,move9);
moveNServos(t*0.15,move10);
moveNServos(t*0.15,move11);
moveNServos(t*0.15,move12);
while(millis()<(pause+t));
}
}
void lateral_fuerte(boolean side, int tempo){
for(int i=0;i<4;i++) servo[i].SetPosition(90);
if (side) servo[0].SetPosition(40);
else servo[1].SetPosition(140);
delay(tempo/2);
servo[0].SetPosition(90);
servo[1].SetPosition(90);
delay(tempo/2);
}
void drunk (int tempo){
pause=millis();
int move1[] = {60,70,90,90};
int move2[] = {110,120,90,90};
int move3[] = {60,70,90,90};
int move4[] = {110,120,90,90};
moveNServos(tempo*0.235,move1);
moveNServos(tempo*0.235,move2);
moveNServos(tempo*0.235,move3);
moveNServos(tempo*0.235,move4);
while(millis()<(pause+tempo));
}
void noGravity(int tempo){
int move1[4] = {120,140,90,90};
int move2[4] = {140,140,90,90};
int move3[4] = {120,140,90,90};
int move4[4] = {90,90,90,90};
for(int i=0;i<4;i++) servo[i].SetPosition(90);
for(int i=0;i<N_SERVOS;i++) oldPosition[i]=90;
moveNServos(tempo*2,move1);
moveNServos(tempo*2,move2);
delay(tempo*2);
moveNServos(tempo*2,move3);
moveNServos(tempo*2,move4);
}
void kickLeft(int tempo){
for(int i=0;i<4;i++) servo[i].SetPosition(90);
delay(tempo);
servo[0].SetPosition(50); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo);
servo[0].SetPosition(80); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(30); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(80); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(30); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(80); //pie derecho
servo[1].SetPosition(70); //pie izquiero
delay(tempo);
}
void kickRight(int tempo){
for(int i=0;i<4;i++) servo[i].SetPosition(90);
delay(tempo);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(130); //pie izquiero
delay(tempo);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(100); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(150); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(80); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(150); //pie izquiero
delay(tempo/4);
servo[0].SetPosition(110); //pie derecho
servo[1].SetPosition(100); //pie izquiero
delay(tempo);
}
void walk(int steps, int T){
int A[4]= {15, 15, 30, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void run1(int steps, int T){
int A[4]= {10, 10, 10, 10};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void backyard(int steps, int T){
int A[4]= {15, 15, 30, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(-90), DEG2RAD(-90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void backyardSlow(int steps, int T){
int A[4]= {15, 15, 30, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(-90), DEG2RAD(-90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void turnLeft(int steps, int T){
int A[4]= {20, 20, 10, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void turnRight(int steps, int T){
int A[4]= {20, 20, 30, 10};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void moonWalkRight(int steps, int T){
int A[4]= {25, 25, 0, 0};
int O[4] = {-15 ,15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 + 120), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void moonWalkLeft(int steps, int T){
int A[4]= {25, 25, 0, 0};
int O[4] = {-15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 - 120), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void crusaito(int steps, int T){
int A[4]= {25, 25, 30, 30};
int O[4] = {- 15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 + 120), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void swing(int steps, int T){
int A[4]= {25, 25, 0, 0};
int O[4] = {-15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void upDown(int steps, int T){
int A[4]= {25, 25, 0, 0};
int O[4] = {-15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(180), DEG2RAD(0), DEG2RAD(270), DEG2RAD(270)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void flapping(int steps, int T){
int A[4]= {15, 15, 8, 8};
int O[4] = {-A[0], A[1], 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180), DEG2RAD(90), DEG2RAD(-90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}
void test(int steps, int T){
int A[4]= {15, 15, 8, 8};
int O[4] = {-A[0] + 10, A[1] - 10, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180), DEG2RAD(90), DEG2RAD(-90)};
for(int i=0;i<steps;i++)oscillate(A,O, T, phase_diff);
}

