

Materiales necesarios:
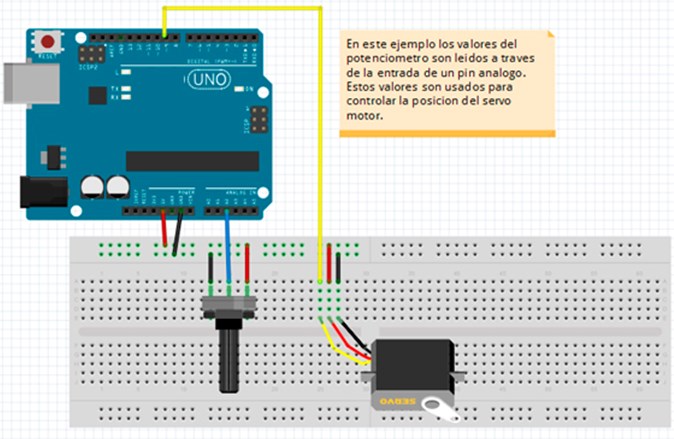
Grafico de Conexión:
Código:
// Control de una posición del servo mediante un potenciómetro (resistencia variable)
#include <Servo.h>
Servo myservo; // Crear un objeto Servo para controlar el servo motor
int potpin = 2; // Pin analógo utilizado para conectar el potenciómetro
int val; // Variable para leer el valor del pin analógo
void setup()
{
myservo.attach(9); // atacha el servo en el pin9 para el servo
}
void loop()
{
val = analogRead(potpin); // Lee el valor del potenciómetro (valor entre 0 y 1023)
val = map(val, 0, 1023, 0, 179); // Escala a usar con el servo (valor entre 0 y 180)
myservo.write(val); // Establece la posición del servo de acuerdo con el valor escalado
delay(15); // Espera a que el servo llegar
}

